
- 约束
- > 0
- 使用者
- NavmeshGenerator, SolidHeightFieldBuilder, SolidHeightField, OpenHeightField, ContourSet, PolyMeshField
- 描述
-
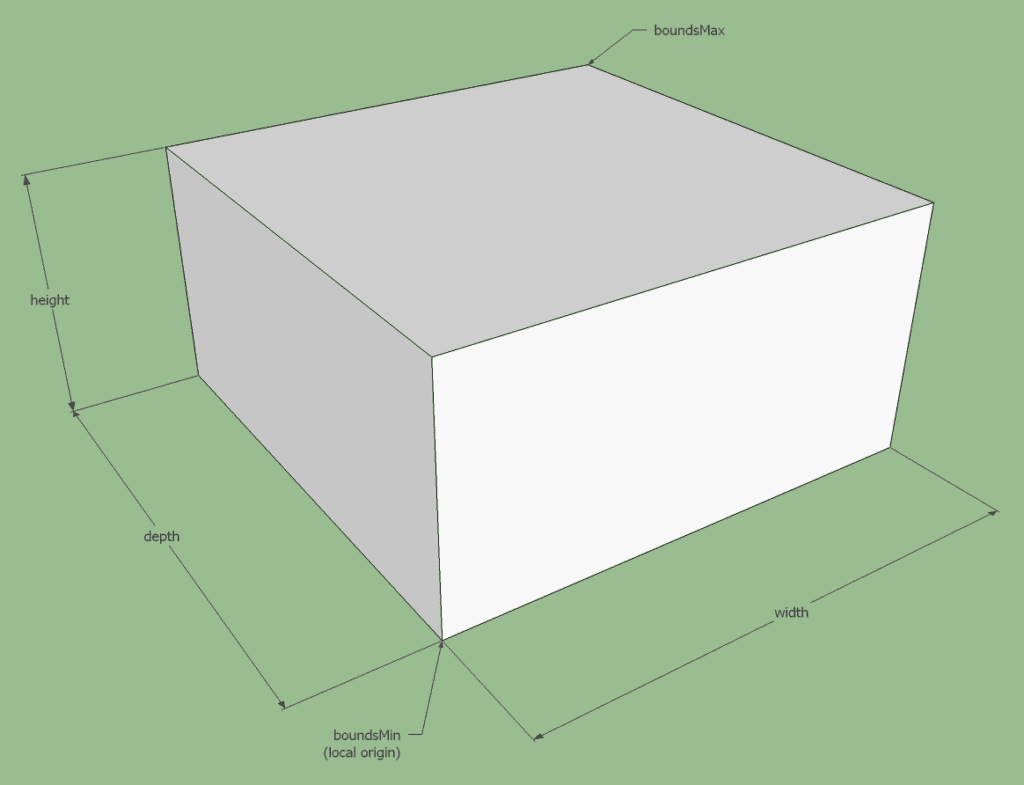
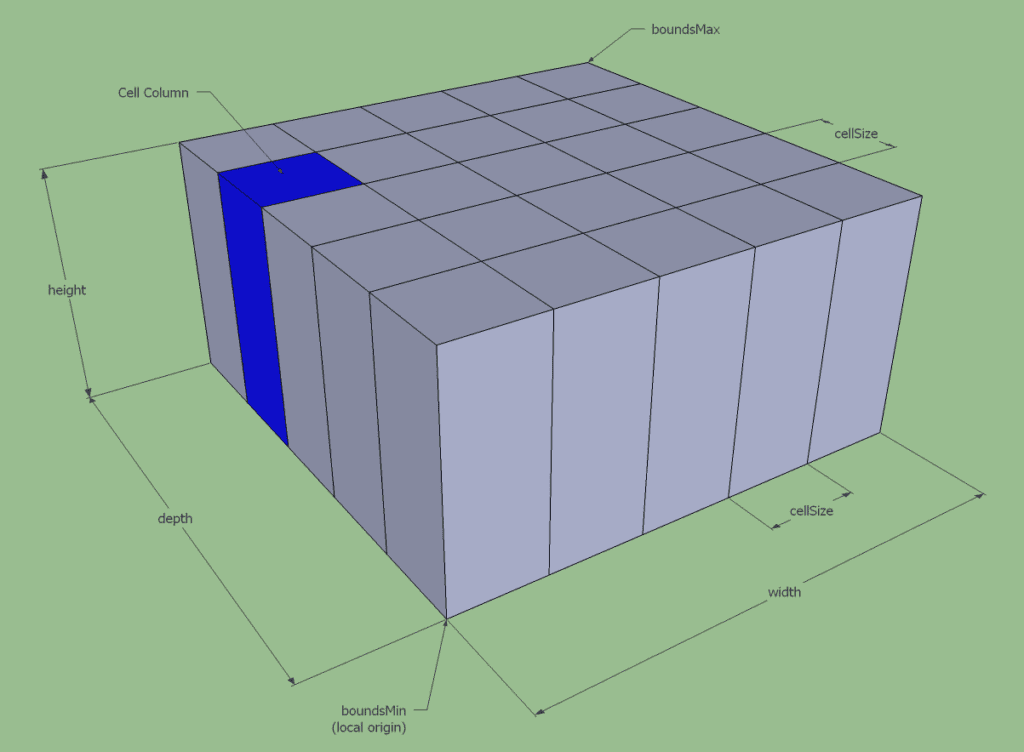
采样源几何图形时使用的宽度和深度分辨率。构成体素场的单元格列的宽度和深度。
单元格放置在体素场的宽度/深度平面上。 宽度与源几何体的 x 轴相关联,深度与 z 轴相关联。
较低的值使得生成的网格更接近源几何形状,但需要更高的处理和内存成本。示例:cellSize与体素场的关系。

有时你可能会注意到障碍物的网格边界出乎意料地宽,或物体一侧与另一侧的边界的宽度不同。 这是网格生成过程的固有行为。 看一下上面体素场的可视化,最终网格中的顶点只能存在于体素的角上。 顶点被对齐到体素网格,体素尺寸越大,最终网格顶点的潜在 xz 平面偏移就越大,边界“错误”就越明显。
原文:http://www.critterai.org/projects/nmgen_study/config.html
Unity官方文档中文版中,将“ledge”一词译为“窗台”,本文亦采用这种译法。
英文文档 中文文档
Recast Navigation文档中对ledge的定义:
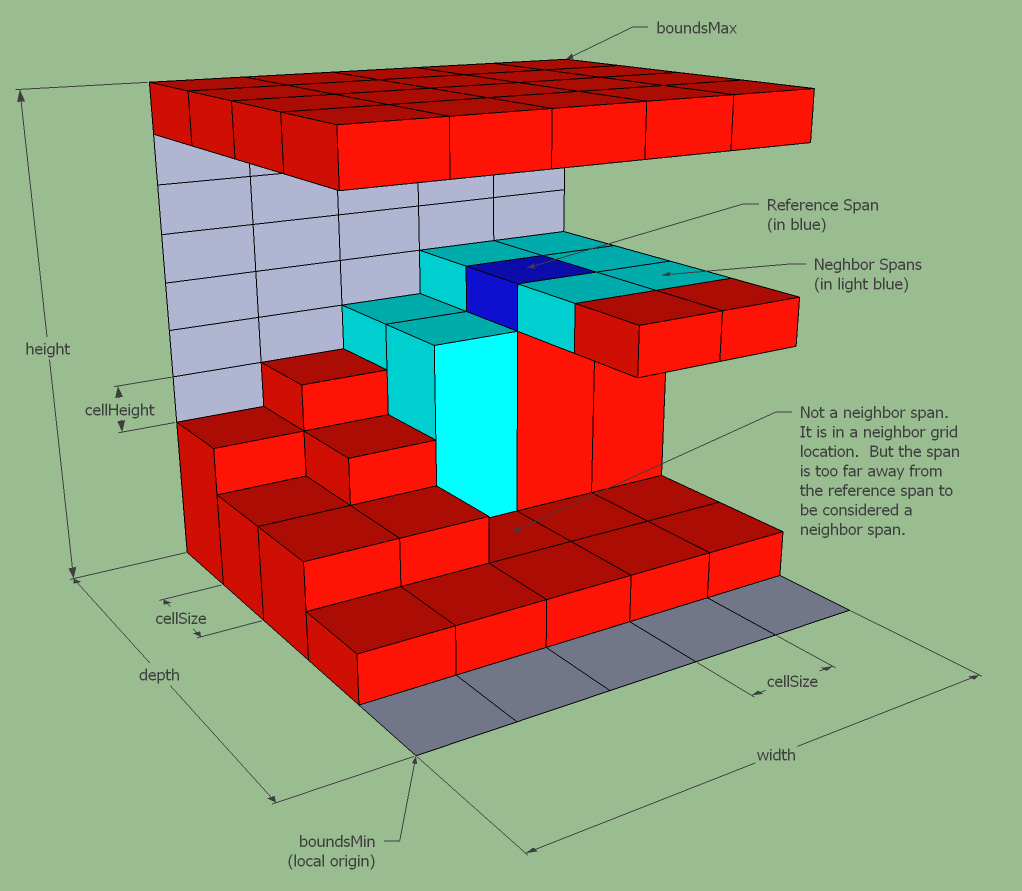
A ledge is a span with one or more neighbors whose maximum is further away than walkableClimb from the current span's maximum. This method removes the impact of the overestimation of conservative voxelization so the resulting mesh will not have regions hanging in the air over ledges.
A span is a ledge if: rcAbs(currentSpan.smax - neighborSpan.smax) > walkableClimb
英文文档 中文文档
Recast Navigation文档中对ledge的定义:
A ledge is a span with one or more neighbors whose maximum is further away than walkableClimb from the current span's maximum. This method removes the impact of the overestimation of conservative voxelization so the resulting mesh will not have regions hanging in the air over ledges.
A span is a ledge if: rcAbs(currentSpan.smax - neighborSpan.smax) > walkableClimb
在进入网格生成每个阶段的细节之前,理解影响最终结果的各种配置参数是很重要的。这个页面提供了NMGen的类所使用的所有配置参数的功能描述,它们如何影响最终结果,以及它们之间如何相互影响。
cellSize
- 约束
- > 0
- 使用者
- NavmeshGenerator, SolidHeightFieldBuilder, SolidHeightField, OpenHeightField, ContourSet, PolyMeshField
- 描述
-
采样源几何图形时使用的宽度和深度分辨率。构成体素场的单元格列的宽度和深度。
单元格放置在体素场的宽度/深度平面上。 宽度与源几何体的 x 轴相关联,深度与 z 轴相关联。
较低的值使得生成的网格更接近源几何形状,但需要更高的处理和内存成本。示例:cellSize与体素场的关系。
有时你可能会注意到障碍物的网格边界出乎意料地宽,或物体一侧与另一侧的边界的宽度不同。 这是网格生成过程的固有行为。 看一下上面体素场的可视化,最终网格中的顶点只能存在于体素的角上。 顶点被对齐到体素网格,体素尺寸越大,最终网格顶点的潜在 xz 平面偏移就越大,边界“错误”就越明显。
{kind=link}
{kind=link}