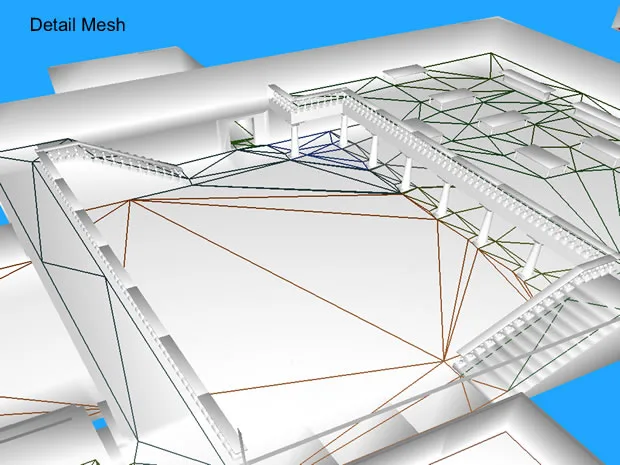
本页介绍了构建导航网格的第五个也是最后一个阶段,即生成具有详细高度信息的三角形网格。
源数据类:PolyMeshField和OpenHeightField
构建类:DetailMeshBuilder
数据类:TriangleMesh
如果你需要了解此阶段执行的操作,请参见处理过程概览。
为什么要执行这一步
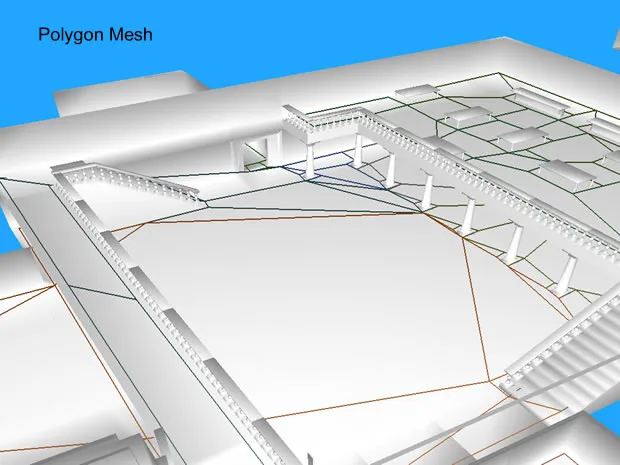
如果将原始源网格的可通过表面投影到xz平面上,并与上一阶段生成的多边形网格重叠,两者将会非常匹配。但在三维空间中,多边形网格可能无法充分遵循源网格的高度轮廓 。这个阶段增加了高度细节,这样细节网格(detail mesh)将在所有轴上与源网格的表面相匹配。为了实现这一点,我们遍历所有多边形并在多边形与源网格过度偏离时沿着多边形的边和其表面插入顶点。
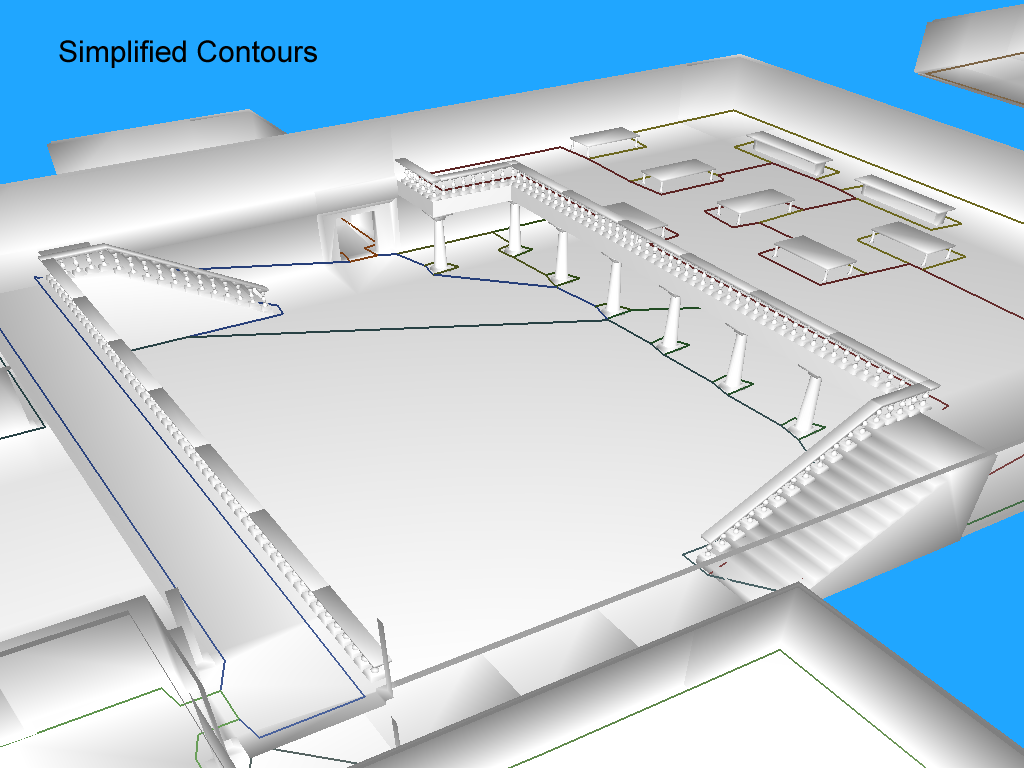
在下面的例子中,楼梯附近的多边形网格在xz平面上匹配,但在y轴上偏差很大。
{kind=link}
{kind=link}